
VLBIで使うサンプラ(ADC)とかを作っている会社(SDRが得意な会社で、色々なRF機器を扱っている)。
東工大、市販の個別半導体でデータと電力を同時伝送できる無線機を開発 | TECH+(テックプラス)
28GHzの5G信号と24GHz(ISM)の電力を与えて、差の4GHzの信号を放射する。ダウンコンバート・アップコンバート(上り・下り)両方可能。無線給電できるので、能動増幅ができたり、移相器(1bit)を制御してビームフォーミングが可能(給電能力は今のところ素子あたり数mA程度なので、能動増幅に使えるかは微妙だけど)。素子事に独立しているはずなので、スケーラブルに使えそう(大面積化しても素子毎に制御信号を増やす必要がない)。輻射器側のビームフォーミングの制御が大変そう。素子1個毎に移相器の制御信号を与える必要があるけど、基地局側の分解能で頑張るのかな。
IFとLOと制御信号をまとめて無線で送れるやつは色々応用できて面白そう。
興味本位にL-4-S-5の制御方式を調べてみた。事前知識として「きわめて単純な」とか「最も簡単な」みたいな記述を見た記憶があるので、ある程度シンプルな方式なんだろうな、と思っていたんだけど、予想より遥かに複雑だった。
姿勢制御は第3/4段分離前に行うけど、制御前にデスピンし、3軸(R/P/Y)を個別に制御した後に、RCSで少し再スピン(リスピンモータの点火不均一・点火衝撃対策)してからリスピンモータでスピンアップし、分離、第4段点火、という流れ(デスピン・リスピンも当然固体燃料)。スラスタは3軸8個だが、当時のスラスタは時定数が長い(100ms)とか、ピッチ・ヨーをカップリングさせないためとかで、3軸個別に(スラスタ4個の合成推力でとかではなしに)制御するほうが単純になるらしい。座標変換はシンクロ(レゾルバ)で行っている。
最近のエレクトロニクスの感覚だと、機械部品(スラスタ)を減らして電気側で頑張るほうがシンプルに作れそうな気がしてくるけど、当時の電子部品の信頼性だと、機械側で頑張るほうが小型で信頼できるんだろうな。
イプシロンは第3段の燃焼初期にラムライン制御を使っているけど、ラムライン制御の歴史としては衛星の姿勢制御でスピン安定が主流の時代に数rpm程度の速度で始まって、以降月探査の時代(おそらくペネトレータ)の制御で1rps程度の速度の研究が行われて、という流れらしい。ロケットでラムライン制御を使用したのはイプシロンの第3段が世界で初めてだそうだ。
ロケットのスピンレートを数rpsとすると、それに適用できるラムライン制御則は2000年代前後あたりになるまでなかったわけか。最上段だけとはいえ、ペネトレータに比べて遥かに大きいロケットで使うにはスラスタの応答速度も相当悪いだろうし。
SS-520-4/5の第3段燃焼前もラムライン制御でGN2を吹く。ただ、スラスタは4個で、すべて0度/180度で配置されている。推力合成で3軸制御を行うには90度ずつ4方向のノズルが必要なので、SS-520-4/5の制御は2軸(ロール+ピッチorヨー)しか制御できない。SS-520-4/5ではスピンレートの制御は必要ないはずだし、スピン前提の制御だから、この配置であればノズルは1個あれば十分制御できる。なぜノズルが4個も乗っているのか謎い。
SS-520-5ではノズルの向きを変えたと書いてあるけど、SS-520-4のノズルの配置と見比べても変わったような感じがない。SS-520-4にはノズルの向きを変えたとは書いてないから、4号機から5号機に対しての変化点だと思うんだけど。
微分のニュートン記法、Unicodeの組み文字でU+0307とU+0308を、アルファベットの大文字・小文字とギリシア文字の大文字・小文字で組んでみた。
ȦḂĊḊĖḞĠḢİJ̇K̇L̇ṀṄȮṖQ̇ṘṠṪU̇V̇ẆẊẎŻ
ȧḃċḋėḟġḣi̇j̇k̇l̇ṁṅȯṗq̇ṙṡṫu̇v̇ẇẋẏż
Α̇α̇Β̇β̇Γ̇γ̇Δ̇δ̇Ε̇ε̇Ζ̇ζ̇Η̇η̇Θ̇θ̇Ι̇ι̇Κ̇κ̇Λ̇λ̇Μ̇μ̇Ν̇ν̇Ξ̇ξ̇Ο̇ο̇Π̇π̇Ρ̇ρ̇Σ̇σ̇ς̇Τ̇τ̇Υ̇υ̇Φ̇φ̇Χ̇χ̇Ψ̇ψ̇Ω̇ω̇
ドットの位置が文字によってまちまちなのが見づらい(フォントによって見やすかったり見づらかったり安定しない)。フォントによっては文字にドットが重なって視認できないものもある。
GPS、とりあえずサブフレーム1,2,3からエフェメリスを取り出して衛星の位置を計算する、みたいな処理は動くようになってきた。
IS-GPS-200Nの110ページに書いてあるECEF→ECIの変換で使うθ = Ω̇ₑ(t-t0)のt0、他の場所で出てこないけど、どういうパラメータなんだろう。Ω̇ₑは地球の角速度の定数だし、t-t0は十分に小さいと想定しているから、t0はtに対してせいぜい数日差程度のオーダーになるような値のはずなんだけど。GPS時刻(週数や秒数)は地球姿勢とは無関係だから、どこかで地球姿勢に関するパラメータを放送しているはずで、それがt0のはずなんだけど、それっぽいやつが見当たらない。
試しに、GPS衛星(4個)/QZS衛星(1個)との距離と擬似距離をグラフ化
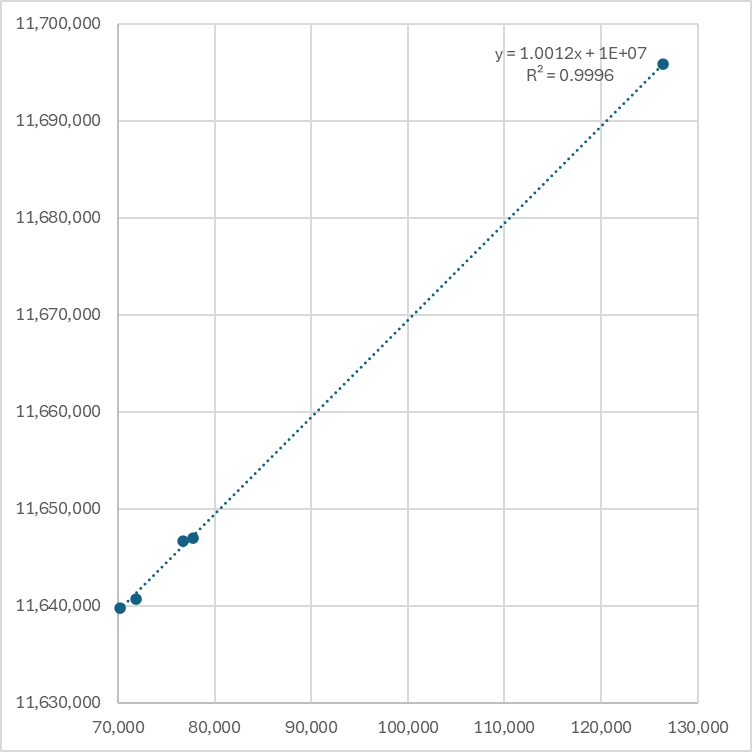
横軸がアンテナから衛星までの距離(us)、縦軸がIQファイルを解析して得た擬似距離(us)。双方とも単位を合わせてあるので、一次関数でフィッティングすると傾きが1の形になる。ただ、GPS衛星が綺麗に傾斜に乗らない。大きいところで625us(190km弱)くらいずれている。どっかでミスってるんだろうけど、どこでミスってるんだろうか。
ISDB-Tの復調(MPEG-2 TSの取り出し)は復調処理がメインなのでソフトウェアでの工夫とか自由度が高いけど、GPSの場合は最初にビット列やビットタイミングを取り出したら、あとは純粋に数学的な処理になるから、工夫の余地が少ない。数学的な知識がないと手も足も出ない。
結構長期間GPSで遊んでいて、とりあえずビット列は取れるようになったけど、それ以降は進展の見込みが得られない。とりあえずこのあたりで中断かなー。何年か寝せてまた気が向いたときに……
とはいえ、他の遊びのネタも特に無いので、次に何をやるか決まっていない。なにか面白そうなこと無いかなー。
0 件のコメント:
コメントを投稿