9月20日に赤平の植松電機で開催されたコズミックカレッジin赤平とかに参加してきました
"とか"と言うのは、コズミック後の北海道スポーツシューティングクラブの例会にも参加したためです
・コズミックカレッジ
コズミックカレッジの対象は小3-中3なので、僕は見学です
今回のコズミックカレッジは参加者が5チームにわかれ、その中で2班を作り、モデルロケットを作る班とmbedを使った缶サットを作る班になります
モデルロケットは紙に印刷されたもので、それを切り出したり接着剤で貼りあわせたりしてC11-3を2本使って打ち上げます
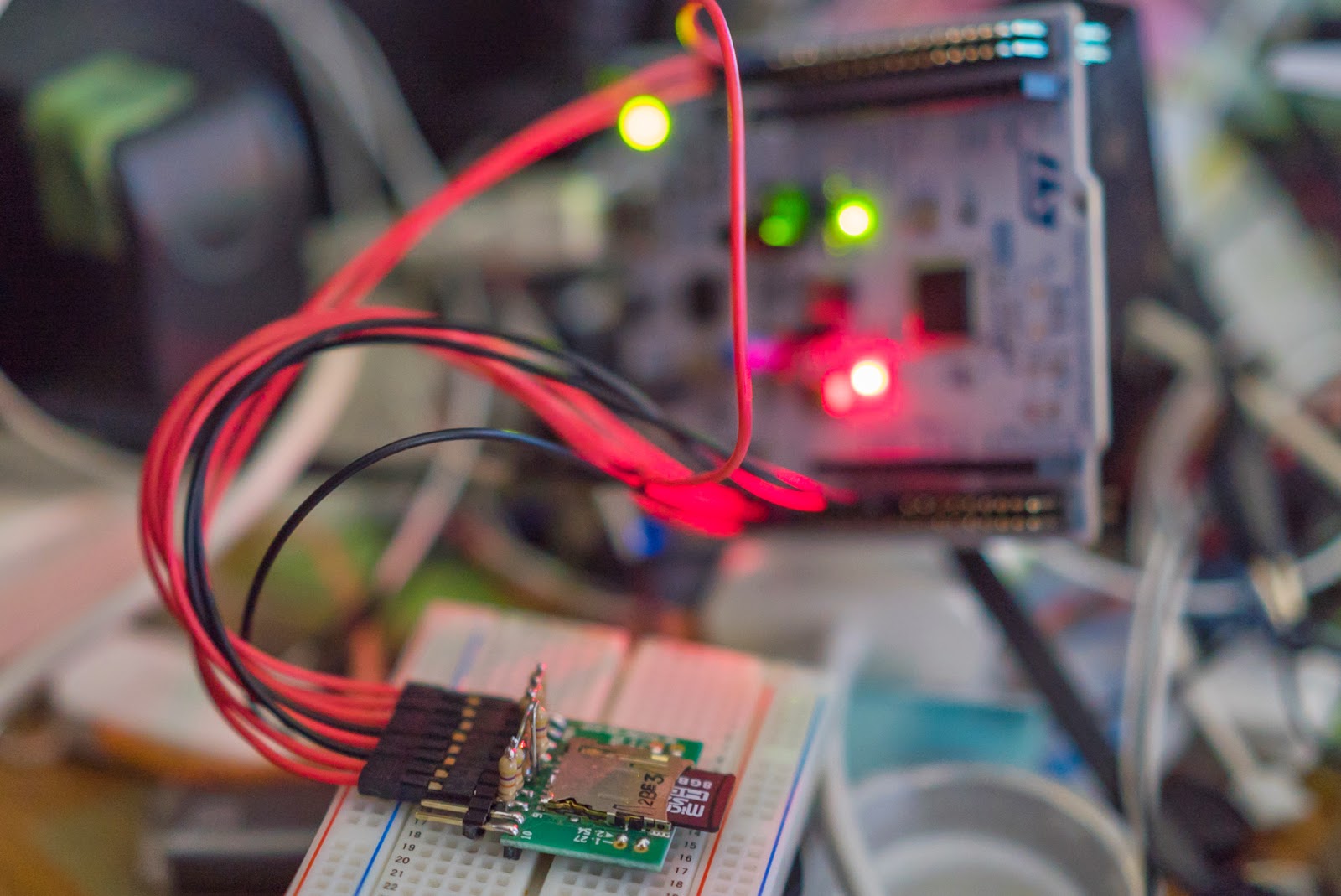
缶サットチームはmbedに気圧センサ(LPS331AP)を接続し、打ち上げ時の高度を計測しました
高度の解析は後日植松電機の人が解析しWebページに掲載するようです
(1機はコズミックの最後に解析方法を説明し高度の速報値を出していました)
モデルロケットチームも缶サットチームも午前中の2時間程度で作り上げていました
ただ缶サットについては予め用意されたLチカコードの点滅周期を変更したりにとどまり、気圧を計測するプログラムは予め用意したものをそのまま使用していました
小学生3年生から参加し、ハードウェアの作成も含めて2時間という制限の中ではこれくらいがちょうどいいと思います
昼食の後、午後は実際にモデルロケットの発射を行いました
打ち上げ直前の説明の時に少し雨がパラパラと降ってきましたが、いざ打ち上げという時になるとほぼ快晴になっていました
晴天の中、C11x2の白煙を伸ばして飛んで行くモデルロケットはすごく綺麗でした
中盤からは雲が増えてきて、最後にはテントが飛ばされるのではと心配するほどの風も吹いていましたが、ちゃんと空力設計を行われたロケットはまっすぐ上昇していき、ロケットも缶サットも全て会場内で回収出来ました
その後植松さんの話が少しあり、コズミックは終了となりました
ただ、コズミック後に時間がある人は植松電機に残り、マルイBOYsを使ったサバゲを行っていました(後述)
・スポシュー
スポシューはコズミックが終わってから植松電機内で行われています
いつもは暗くなってからでしたが、今回はコズミック参加者に声をかけて、明るい内に打ち合いをしました
大人も子供も全員に10禁電動ガン(一部はエアコキ)を配り、バリケードを設置して打ち合います
チーム分けは大人対子供の2チームで、保護者は子供との遊び方を知っているためか、みんな楽しそうに遊んでいました
そして日が暮れてコズミック参加者が解散した後に、スポシューの参加者が集まりました
今回のスポシューは参加者が少なめでしたが、いつもどおり屋内で色々打ったりした後に、真っ暗になってから屋外で打ち合いをしました
真っ暗と言っても、今回は水銀灯を点灯させていたためにうっすらと何処にいるかはわかります
前回は真っ暗な中でしたが、フルオートトレーサーを全員装備していたため、マズルフラッシュ等で何処にいるかが一目瞭然でした
今回はそれが無いためにどこから打たれてるかがわからず、弾道も見えないためにいきなりヒットすることがありました
「弾道が見えないから狙いづらい」という声もありましたが、本来の打ち合いは弾道は見えないので、これもアリかなと思います あとトレーサー使うとすぐにヒットして楽しくないですし
僕もいつもは銃を持って打ち合いに参加しましたが、今回は途中途中でカメラを持って撮影を行っていました
上の写真はISO51200 SS1/2 F3.5という感じです
真っ暗なのでファインダーでは見えず、フォーカスはマニュアルでてきとーな位置に固定です
ノイズだらけでピントも甘いので緑一色にすると意外とそれっぽく見えるのが面白いですw
とりあえず今回わかったのは、この程度の人数(8人くらい?)だとほとんど誤射されない ということです
ということで次は僕の位置をバレやすいようにケミカルでも持って、α7sで挑みたいと思います
さすがに誤射されてレンズとかに当たったら悲しいので
ISO51200 SS1/2 F3.5をα7SのISO409600 F1.8に当てはめると、シャッタースピードは1/60くらいまで稼げるようです
ということで次は動画にチャレンジです
今回僕が使用したARはこんなかんじです
KeyModベースにアングルグリップとライト 反対側にContour ホロサイトとバックアップアイアンサイト と、ちょっとタクトレっぽい感じです
短時間しか使ってないですが、KeyModにグリップは不要な気がします
ライトも屋外だとほとんど使いものにならないので、不要か、物凄い明るいライトを付ける必要がります
ホロサイトはEoTechの実物を借りたため、レティクルも綺麗だし透明度も高いので使いやすいです
ただ中華の買ったまんまらしく、セミオートで撃てない(!)という不具合がありました
弾ばら撒くのはすきじゃないんだけどなぁ…
次回のコズミック&スポシューは11月15日です 真冬です 寒いと思います
スポシューは去年の11月に1回目を行ったので、次回が1周年です